






















Podaljšan delovni radij
22.09.2020
V zadnjem času je veliko govora o sodelujočih robotih in njihovem potencialu za nove aplikacije v robotiki. Pred nakupom pa je treba vseeno dobro premisliti, česa vsega naj bi bil sposoben sodelujoči robot, kako mora biti zasnovan in ali je smiselno podaljšati njegov delovni radij z dodatnimi osmi.
Sodelujoči roboti lahko pomagajo delavcem na različne načine, npr. pri dvigovanju težkih predmetov ali tako, da prevzamejo enolična in utrujajoča opravila. Primerni so tudi za operacije s predpisanim potekom, ki jih človek ne more izvajati tako natančno, dolgotrajno, hitro in zanesljivo, kot je npr. privijanje filigranskih vijakov ali izdelovanje kovičenih in lepljenih spojev.
 »Linearno-rotacijska os odpravi odvisnost od omejenega kota zasuka robotovega sklepa.
»Linearno-rotacijska os odpravi odvisnost od omejenega kota zasuka robotovega sklepa.
Ali so potrebne dodatne osi?
Njegovih delovnih nalog običajno ni težko opredeliti, toda kako velik in močan naj bo sodelujoči robot, da jih bo zanesljivo izpolnjeval? Pri izbiri velikosti in zmogljivosti robota je treba upoštevati potrebno nosilnost, doseg, delovni radij in trajanje ciklov. V okviru teh parametrov se hitro izkaže, ali bo zadostovalo šest osi sodelujočega robota ali pa bo treba delovni radij razširiti še s sedmo, osmo ali celo deveto dodatno osjo. Delovni radij robota je mogoče povečati npr. z linearno tehniko RK Rose+Krieger: dvižni steber, kot je model Powerlift Z, se lahko uporabi za višinsko nastavitev sodelujočega robota, medtem ko ga linearne osi iz serij MonoLine in DuoLine prevažajo po oseh X in Z. Robot je lahko pritrjen na vrtilno napravo in tako omogoči delo z vključenim vrtenjem okrog osi Y. Na voljo so tudi celi portalni sistemi za razširitev delovnega radija.
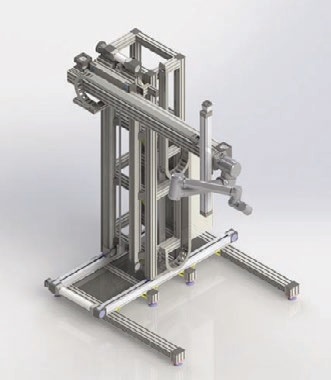 »Večosni prostorski portal premakne sodelujočega robota na vsakokratno delovno mesto in mu tako razširi delovno območje.
»Večosni prostorski portal premakne sodelujočega robota na vsakokratno delovno mesto in mu tako razširi delovno območje.
Sodelujoči ali klasični roboti?
Med premišljanjem o možnih rešitvah se vedno znova pojavlja vprašanje, ali bi bil primernejši sodelujoči ali klasičen robot. Sodelujoči roboti se najbolj izkažejo takrat, ko aplikacija zahteva trajno sodelovanje z ljudmi. Če robot in človek sodelujeta samo med učenjem, proces pa se nato izvaja samodejno, v večini primerov zadostuje klasičen robot. Od delovne naloge, ki jo bo prevzel sodelujoči robot, je nato odvisno, ali bo integracija preprost mehansko-električni proces, kot denimo pri samostojnih rešitvah, ali pa krmilnotehnično in logistično bistveno zahtevnejša vključitev v proizvodno okolje. Razjasniti je treba tudi vprašanja v zvezi z vrhom robota (prijemalo ipd.) ter dovodom in odvodom stisnjenega zraka, lepil, varilne žice ipd. Pri inštalaciji je odločilno tudi to, ali se morajo osi, vključno z dodatnimi gnanimi osmi sistema, premikati istočasno ali druga za drugo. Končno pa mora biti poleg varnosti samega sodelujočega robota zagotovljena tudi varnost celote vseh osi v smislu Direktive o strojih 2006/42/ES.
Širok spekter uporabe
Kot je bilo že nakazano, je spekter možnosti uporabe sodelujočih robotov izjemno širok, od samostojnih rešitev za strego in »Linearno-rotacijska os odpravi odvisnost od omejenega kota zasuka robotovega sklepa. »Večosni prostorski portal premakne sodelujočega robota na vsakokratno delovno mesto in mu tako razširi delovno območje. Junij • 102 (6/2020) • Letnik 15 81 PROIZVODNJA IN LOGISTIKA odstranjevanje materiala do kompleksnih prostorskih portalov za varilske aplikacije. Pri preprostejših rešitvah je pogosto v ospredju ergonomija delovnega mesta in premični sodelujoči roboti lahko tako oskrbujejo montažna delovna mesta z obdelovanci in jih podajajo, zbirajo obdelane dele in jih po obdelavi premaknejo na mesto izvajanja naslednje operacije. Za takšne uporabe je smiselna razširitev šestosnega sistema sodelujočega robota z dodatnimi pogonskimi osmi, saj je gibanje sodelujočega robota na dvižnem stebru lahko usklajeno z gibanjem delovnega mesta. Linearna os poleg tega razširi delovni radij robota v smeri X, npr. za povezovanje več delovnih ali odlagalnih mest.
 »Dodatna linearna os razširi delovni radij sodelujočega robota v smeri osi X in tako omogoči povezovanje več delovnih mest.
»Dodatna linearna os razširi delovni radij sodelujočega robota v smeri osi X in tako omogoči povezovanje več delovnih mest.
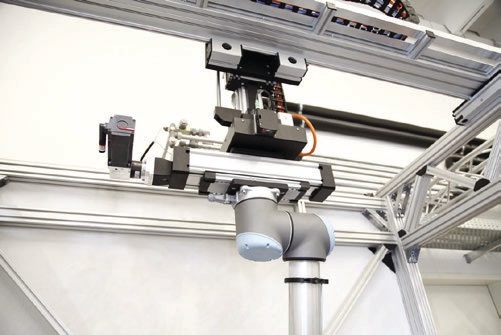
Zahtevne naloge za sodelujoče robote Pri zahtevnih aplikacijah, kot so npr. kompleksne varilne operacije, je težišče pozornosti praviloma na ponovljivosti in trajni natančnosti. RK Rose+Krieger skupaj s Fraunhoferjevim inštitutom IEM razvija rešitve za razširitev delovnega območja varilskih sodelujočih robotov v treh razsežnostih. Tako so med drugim realizirali triosni prostorski portal kot del robotiziranega strežnega in obdelovalnega sistema. Neovirano komunikacijo med robotom in prostorskim portalom omogočajo pametni senzorji in algoritmi. Rezultat je sinhronizirano gibanje portala in sodelujočega robota ter možnost preprostega prilagajanja sistema različnim delovnim scenarijem brez zahtevnih predelav in priprav. Pozitivni »stranski učinki« izhajajo tudi iz togosti prostorskega portala, npr. visoka natančnost pri uporabi orodja in znatno nižji stroški v primerjavi z običajnimi industrijskimi roboti.
 »Prostorski portal, ki so ga razvili v podjetju RK Rose+Krieger, omogoča sinhronizirano gibanje vseh petih osi in robota
»Prostorski portal, ki so ga razvili v podjetju RK Rose+Krieger, omogoča sinhronizirano gibanje vseh petih osi in robota
Brez načrtovanja ne gre
Kupec mora pred nabavo sodelujočega robota vsekakor opraviti vse faze podrobnega načrtovanja. Smiselna je tudi vključitev strokovnjakov za linearno pogonsko tehniko oz. krmilnotehnično sistemsko integracijo, da robotski prinašalec upanja ne bi postal čuvaj skladišča za odsluženo kramo. Vedeti moramo, da robot niti ni nujno potreben, saj za rešitev morda zadostuje že dobro premišljen dvo- ali triosni linearni sistem.
Vir: www.rk-rose-krieger.com